شرکت بوستون دینامیکس در ویدئویی جدید نشان داده چگونه روبات انسان نمای اطلس بلند کردن و حمل اشیای سنگین صنعتی را با استفاده از یادگیری تقویتی و آموزش های شبیه سازی مقیاس وسیع، آموخته است.
دریافت
۱۹ MB
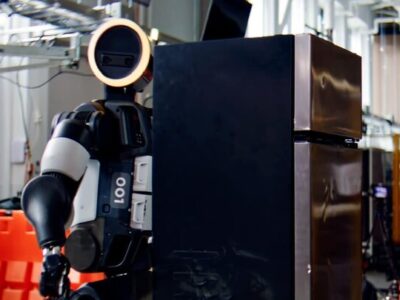
به گزارش خبرگزاری مهر به نقل از اینترستینگ انجینرینگ، این شرکت در یک پست وبلاگی فنی جدید نشان داد روبات اطلس قسمت قفسه سینه خود را ۱۸۰ درجه می چرخاند و برای برداشتن یک یخچال کوچک خم می شود، آن را حمل و همزمان وزن درحال تغییر داخل شی را تنظیم می کند.
نمایش جدید مهارت های روبات نشان دهنده تغییری از حرکات طراحی شده روبات و گذار به سمت طراحی رفتارهای صنعتی سازگارتر برای کارخانه ها، انبارها و محل های ساخت و ساز است. بوستون دینامیکس اعلام کرده روبات اطلس را به عنوان یک ابزار همه منظوره برای فعالیت های فیزیکی توسعه داده است.
روبات مذکور به جای اتکا به دوربین ها از «حس عمقی» یا آگاهی داخلی بدن برای حس کردن وزن، کنترل توازن و مقاومت در حال حرکت دادن اشیا استفاده می کند. این شرکت اعلام کرد روش مذکور به اطلس امکان می دهد به طور واقعی خود را با بارهای بی ثبات و شرایط در حال تغییر سازگار کند.
شرکت بوستون دینامیکس روبات اطلس را از طریق یادگیری تقویتی آموزش می دهد و همزمان روبات به طور مرتب یک فعالیت بلند کردن بار را در شبیه سازی ها تحت شرایط مختلف تکرار می کند. این شرکت عوامل مختلفی مانند وزن شی، اصطکاک زمین، قدرت کنترل پنجه ها، و همچنین موقعیت یخچال را برای وادار کردن روبات به سازگاری با شرایط، تغییر داد.
این شرکت در پستی نوشته است: اطلس حرکات را چند میلیون ساعت در شبیه سازی های موازی روی واحدهای پردازش گرافیکی تمرین کرد.
این فرایند با یک مسیر مرجع شروع می شود که ممکن است حرکتی انیمیشنی یا نمایشی از راه دور باشد. در مرحله بعد برای انجام درست فعالیت ها مانند حفظ قدرت کنترل پنجه و متوازن باقی ماندن حین نوسانات خارجی، به روبات اطلس جایزه داده شد.
شرکت مذکور مدعی است یکی از مزایای پلتفرم جدید اطلس کاهش «شکاف شبیهسازی تا واقعیت»، یک چالش قدیمی در حوزه روباتیک است که در آن رفتارهای آموزشدیده در شبیهسازی به دلیل متغیرهای غیرقابلپیشبینی مانند اصطکاک، تأخیر یا نویز حسگر، در دنیای فیزیکی شکست میخورند.